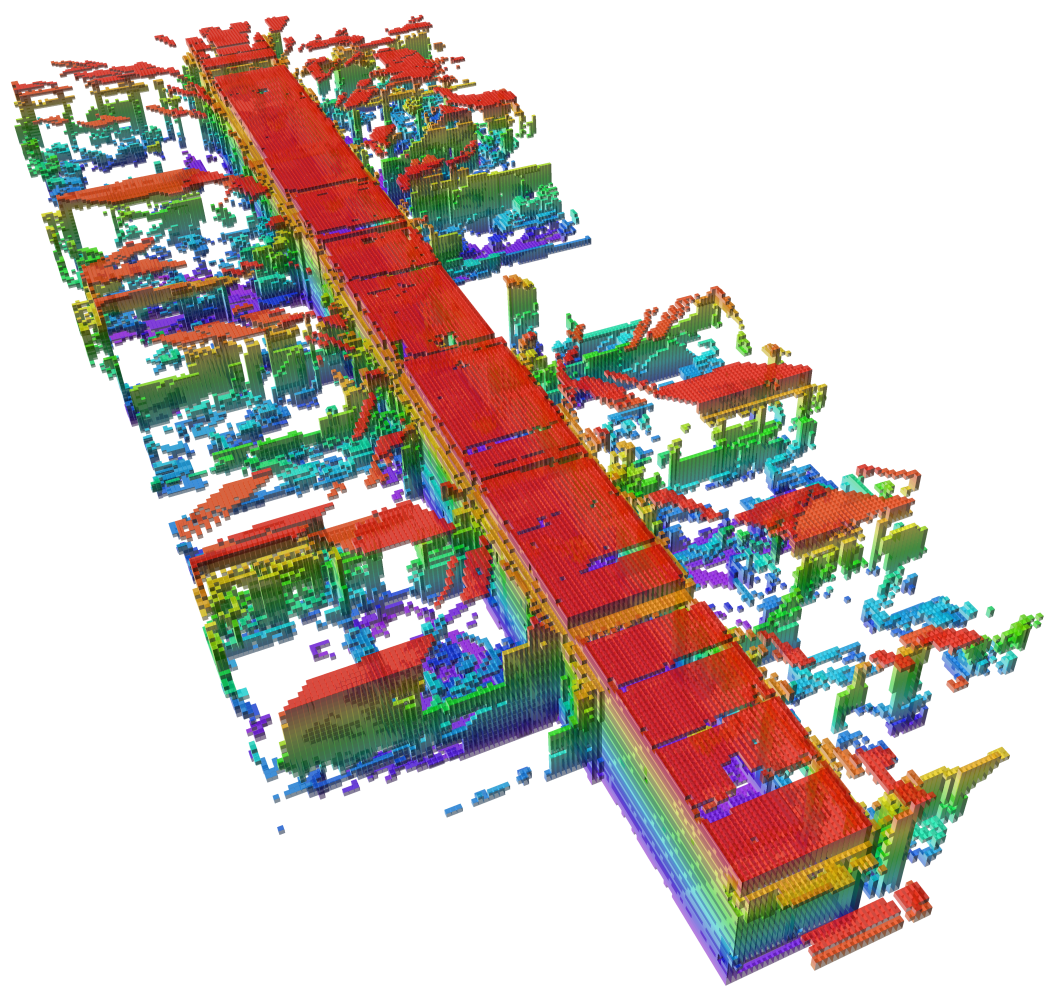
OctoMap
The OctoMap library implements a 3D occupancy grid mapping approach, providing data structures and mapping algorithms in C++ particularly suited for robotics. It has been released as open source at github http://octomap.github.com. It also includes the 3d distance transform EDT3D.
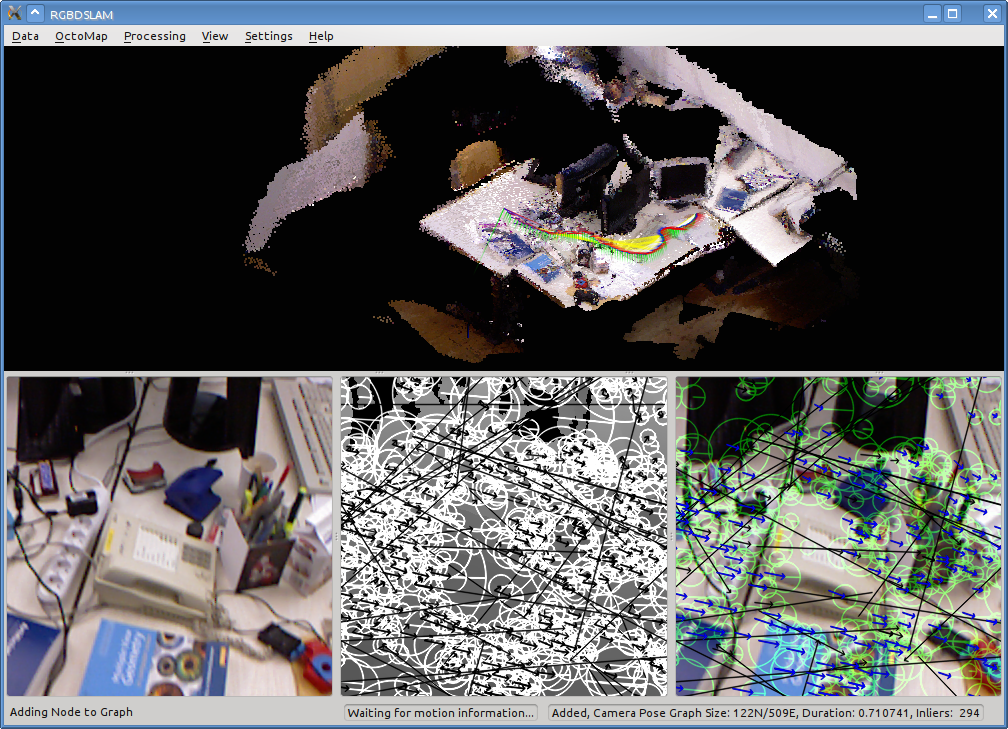
RGBDSLAM
RGBDSLAM is the award-winning 3D mapping system developed at the University of Freiburg in the context of First-MM. In the spirit of the project, it allows end users to quickly capture a 3D map using a GUI. The generated map can be saved in the OctoMap format and is used, e.g., for the motion planning skill. RGBDSLAM is open source and fully integrated in ROS. Download and documentation can be found at the ROS wiki page.
Articulated kinematic models
Our software for the learning of articulated objects, developed by University of Freiburg, is released as open source and fully integrated with ROS. Download and extensive documentation ist available at the ROS wiki page.
The extension for learning dynamic (including the kinematics) models of doors from laser range perception can be found here.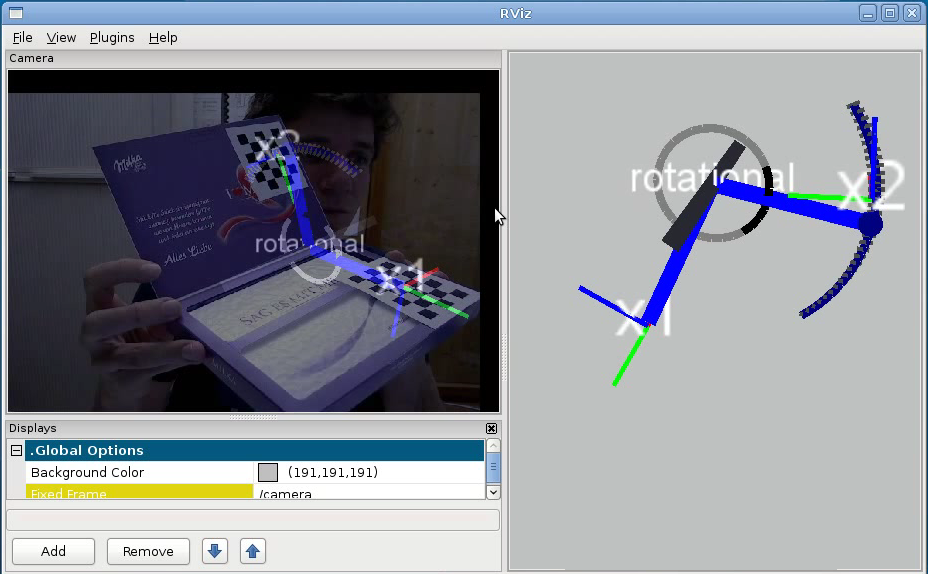
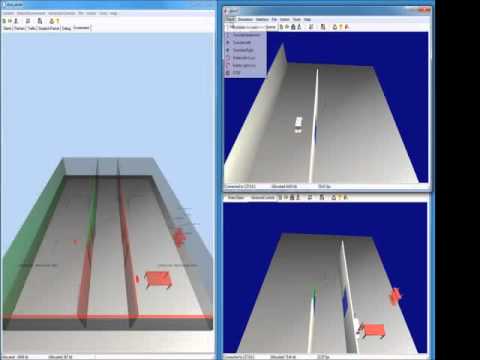
ORCA Robotics Simulator
The ORCA robotics simulator environment, from the Foundation for Research and Technology, ICS was initiated in 2006 and developed up to 2012 by Harris Baltzakis. It is now maintained by members of the CVRL group (head of group: Panos Trahanias). It is available for download as a Windows only platform binary application.